Simrad Ex500 expanded bottom variables
The Simrad Ex500 echosounders can be configured to deliver echogram telegrams (Q) in two distinct echogram categories - main (pelagic) echogram and bottom echogram. The data points allocated to the main echogram are positioned in space relative to the surface. The data points allocated to the bottom echogram are positioned in space relative to the sounder-detected bottom.
For example, the echosounder may be configured to deliver 500 data points from 0m to 250m from the echosounder and 150 data points from 10m above the sounder-detected bottom to 5m below the sounder-detected bottom. The main echogram has a resolution then of 500 data points over 250m or (0.5 meter) and the bottom echogram a higher resolution of 150 data points over 15m (0.1 meter) for a total of 650 data points.
The main echogram is available in Echoview as a standard Sv raw variable named "Sv Qn Telegrams Tt" (n being the transducer number).
The bottom echogram data are available in Echoview as a variable named "Sv Qn Telegrams Tt with expanded bottom" (t being the transducer number) which is created as composite of the main and bottom echogram data. This composite variable is defined over the range of the main echogram at the maximum resolution of the main and bottom echograms, or better. That is, in the example above, it would have 10 data points per meter over a range of 0m to 250m from echosounder, thus 2500 data points per ping. The data points 10m or more above the sounder-detected bottom and 5m or more below the sounder-detected bottom are filled with data from the main echogram, every 5 adjacent data points will contain the same value (as only 1 value is available in the main echogram data for each data point in the composite echogram). A detailed specification is given below.
This example is summarized in the table below and the images which follow.
|
Worked example of expanded bottom echogram |
||||
|
Echogram |
Range |
Data points |
Resolution |
Image below |
|
Simrad main echogram |
0 to 250m re transducer |
500 |
0.5 m |
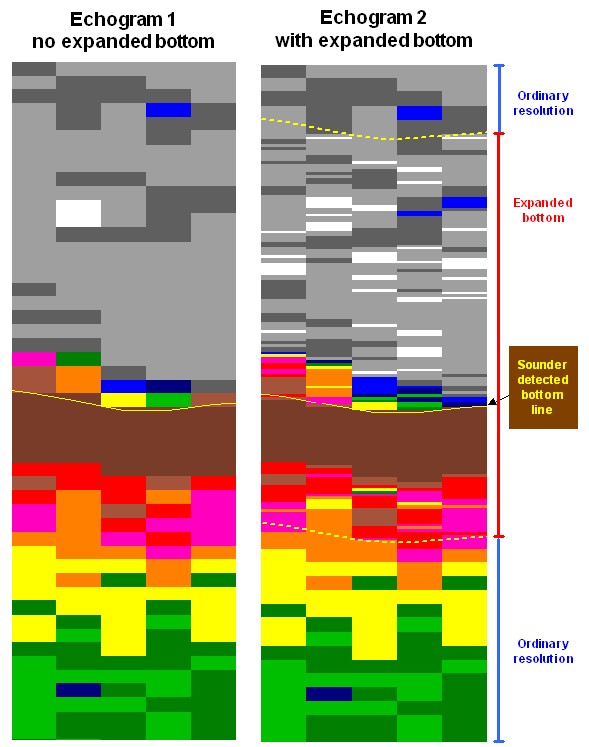
Echogram 1 |
|
Simrad bottom echogram |
-10 to 5m re bottom |
150 |
0.1 m |
|
|
Echoview echogram with expanded bottom |
0 to 250m re transducer |
2500 |
0.1 m |
Echogram 2 |
Specification
Warning: The remainder of this page contains details and setting names that are specific to the EK500. Similar concepts apply to EA500 and EY500 and you should refer to the owners manual to confirm the differences.
The EK500 allows the configuration of the following six settings on its Ethernet/Echogram and Serial/Echogram menus (see Simrad EK500 Operator Manual, Operation):
Range
Range Start
Bottom Range
Bot. Range Start
No. of Main Val.
No. of Bot. Val.
Let us further define:
|
Res. Main |
= |
Range / No. of Main Val. |
|
Res. Bot. |
= |
Bottom Range / No. of Bot. Val. |
Then the expanded bottom echogram will appear
|
identical to the main echogram |
if |
Res. Main |
|
similar to the main echogram (following the resampling rules below) |
if |
Res. Main < Res. Bot. |
Resampling rules are as follows.
The resolution of the echogram with expanded bottom is increased by a factor n such that:

where
ceil(x) is the lowest integer greater than or equal to x
The resolution of the expanded bottom echogram is equal to Res. Main/n
The range of the expanded bottom echogram is the same as the range of the main echogram (Range)
The number of data points per ping for the expanded bottom echogram is Range / (Res. Main/n)
The data from the bottom echogram fills samples in the expanded bottom echogram by a system of weighted averages as illustrated below (where n = 5):
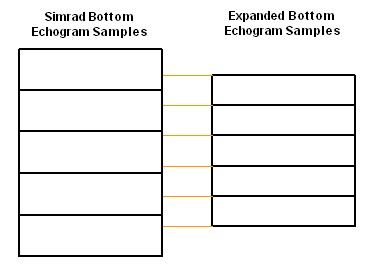
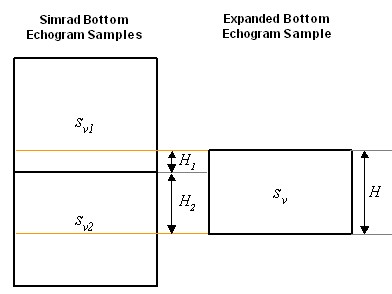
The samples in the expanded bottom echogram are equal to or smaller than those in the Simrad bottom echogram - on account of the ceil(x) function noted above. Further, each sample from the Simrad bottom echogram is placed in space relative to the sounder-detected bottom line (which is defined to a considerably higher resolution than the array of echogram data points) and as a consequence does not necessarily align with a single sample in the expanded bottom echogram even where the sample size is identical. As a consequence, each sample in the expanded bottom echogram will draw data two (possibly one) samples in the Simrad bottom echogram. The value in the expanded bottom echogram is calculated as the weighted average of the values it draws upon as follows (in the linear domain):

where:
Sv = volume backscattering coefficient for the expanded bottom echogram sample (m2/m3)
T = sample thickness in the expanded bottom echogram (m)
Sv1 = volume backscattering coefficient for the first contributing sample from the Simrad bottom echogram (m2/m3)
T1 = contributing sample thickness for Sv1 (m)
Sv2 = volume backscattering coefficient for the second contributing sample from the Simrad bottom echogram (m2/m3)
T2 = contributing sample thickness for Sv2 (m)
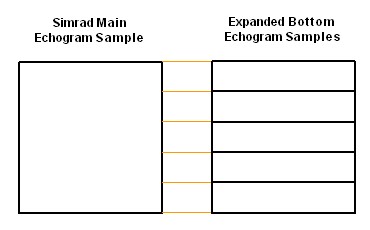
Where no bottom echogram data are available, the data points (samples) in the expanded bottom echogram are filled with data from the main echogram. There are exactly n samples in the expanded bottom echogram for every data point in the main echogram as illustrated below (where n = 5):
Note:
No expanded bottom data will be visible on an Echoview expanded bottom echogram where:
- n
 1
1 - the Simrad bottom echogram is outside of range of the main echogram
- there is a break in the sounder-detected bottom line