Noise, background object and signal removal in Echoview
Echoview provides several pathways for you to manage noise in your data (refer to Background noise removal).
- Data thresholding
- Mask data samples above or below a level you specify. This can be a constant or time-varied.
- Analysis variables for estimating noise
- The Sv_noise, NASC_noise and ABC_noise analysis variables estimate the noise level in the data, which you can then subtract.
- Operators for managing noise
- Choose a suitable operator.
Data thresholding
You can filter the ping samples in a variable by setting a threshold(s) on the Data page of the Variable properties dialog box.
The thresholding options depend on the data type.
Important
Setting a threshold modifies the values of the ping samples in that variable. Therefore, when applying a threshold, consider the order of operations in your workflow.
For example, if you set a threshold then determine the noise with an analysis variable, you could obtain an incorrect noise level estimate.
Similarly, if your threshold sets the area surrounding a signal to no data, a transient noise operator may treat that signal as noise.
Note that threshold parameters are inherited from the parent variable (refer to Inheritance of properties).
Analysis variables for estimating noise
The Sv_noise, NASC_noise and ABC_noise analysis variables estimate the background noise. You can subtract this noise level from your data outside Echoview.
Refer to the Background noise analysis variables page for instructions on setting up the export.
In general, do not apply thresholding beforehand (refer to Data thresholding above).
Operators for managing noise
|
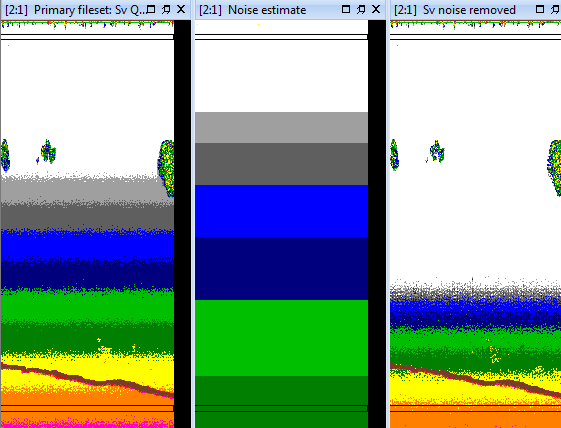
Background noise may manifest as a ‘TVG rainbow’ on an echogram (see Figure 1). This operator estimates the background-noise level and is based on the algorithm and definitions described in De Robertis & Higginbottom (2007). |
|
|
Estimates the ratio between the signal and the background-noise level for each sample in decibels and is based on the algorithm and definitions described in De Robertis & Higginbottom (2007). See also Background noise estimation. |
|
|
This operator removes background noise for single beam and multibeam Sv, TS and Power dB variables. The Background Noise Removal algorithm assumes that some portion of the sampled acoustic signal is dominated by background noise. It estimates the background noise value for each ping and subtracts it from the ping's samples. The algorithm analyzes the echogram by averaging the sample values within averaging cells around each ping. The averaging cells have a fixed horizontal extent in pings and a fixed vertical extent in samples. The noise estimate for a ping is the minimum of its cell averages. You can specify six settings on the Background Noise Removal page of the Variable Properties dialog box. Four settings specify the averaging cell used to determine the noise estimate. Two Threshold settings set the Maximum Noise and Minimum SNR. The algorithm uses concepts discussed in "A post-processing technique to estimate the signal-to-noise ratio and remove echosounder background noise." by A. De Robertis and I. Higginbottom (2007). The algorithm page discusses background noise removal strategies that may be helpful with low SNR data. |
|
|
This operator calculates a statistic from a window of pings around the current ping. This statistic is intended to capture the static background elements present in the data. It then subtracts that statistic from the current ping, leaving the data without the background. |
|
|
Kovesi image denoising algorithms have been adapted for use in Echoview with multibeam imaging sonar data from a MATLAB script copyrighted by Peter Kovesi. The algorithm doesn't distort data and it preserves image detail. Imaging sonar data may benefit by using this operator prior to using the Multibeam background removal operator. Note: The Kovesi image denoising requires a lot of processing. |
|
|
Impulse noise may be caused by interference from other sonars which manifest as short ‘flecks’ on an echogram. This operator identifies and adjusts sample values that are significantly higher than those of surrounding samples at the same depth. |
|
|
Transient noise may be sound generated by wave-hull collisions which manifest as long ‘spikes’ on an echogram. The operator identifies and adjusts sample values that are significantly higher than those of surrounding samples. |
|
|
Identifies and adjusts pings whose samples are much higher in value than samples in surrounding pings. |
|
|
An attenuated signal may appear as missing pings or pings with significantly weaker echoes than surrounding pings. This operator identifies and adjusts pings which show an attenuated signal strength when compared to the surrounding pings. |
|
|
(for multibeam variables only) |
Customize lower and upper noise thresholds for your data. |
|
Figure 1: Left panel: Sv echogram with TVG-noise stripes. Middle panel: Data generator operator configured for a Constant + TVG curve noise estimate. Right panel: Linear minus operator for Sv - noise estimate. |
See also
About algorithms
Background noise calculation
Background noise subtraction references
Time-varied threshold algorithm
About time varied gain