Towed body correction
| Loading and viewing > Calibration > Background noise-removal > Detection and filtering > Classification > Characterization |
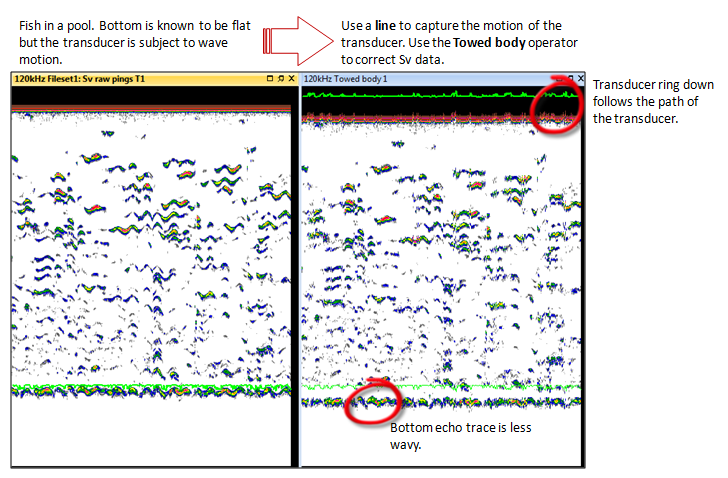
If a transducer is mounted on a towed body, variations in the depth of the transducer during the survey will be embedded in the data. An otherwise flat bottom may appear inclined or undulating depending upon the vertical motion of the transducer while sounding. If the depth of the towed body is monitored and recorded it can be used in Echoview to correct the echogram data.
The Echoview Towed body operator (with usage caveats) may be useful for downward facing transducers mounted on a towed body.
Depth information may also be applied using the Heave source setting on the Platform Properties dialog box. This is preferable to using the Towed body operator. See also: About heave compensation.
Scenario
Dataflow
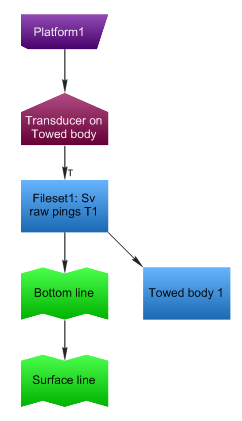 |
Notes:
|
See also
Virtual variable applications
Synchronizing towed media data with echograms