Synchronizing towed body media with echograms
Echoview Synchronize, Synchronize To Point or Auto-synchronization allow echogram and Media window synchronization.
Required data
- Concurrent echosounder and towed body media data
- GPS variable
- This data is generally recorded with echosounder data. The GPS fixes provide known times and enable the calculation of the projected horizontal distance of the towed body from the tow point. GPS data also enable the calculation of the offset time for the towed body. This is the extra time required for the towed body position to match the ping data position.
- The length of a towed body tow line
- Echoview supports tow lines of fixed length or variable length. A length time series can be added to a separate fileset as length CSV file. This file is specified on the Media Position page of the Media window.
- The location of the tow point on the platform
- This is specified on the Media Position page of the Media window.
- The towed body fixed depth or depth time series
- This data can be added to a separate fileset as a depth CSV file. The file is specified on the Media Position page of the Media window.
Note:
- The Towed body time offset virtual line and the echogram synchronization with towed body media use similar algorithms. The Towed body time offset operator adjusts a towed body depth time line. When the line is displayed on an echogram you can view the samples coinciding with the towed body position. The Towed body time offset operator issues warning Messages about calculation issues. The echogram synchronization with towed body media does not have this level of diagnosis.
Synchronizing an echogram and towed media data
- Create a new EV file.
- Add echosounder files, image/video files and a length CSV file to separate fileset tabs.
- On the Dataflow window, select the Media variable corresponding to the added image/video file, then right-click and select Variable Properties.
- Select the Media Position page and configure the settings.
- Select OK.
- Double-click to display an echogram.
- Double-click to display a Media window.
- Use right-click menu, Synchronize or Synchronize to Point or an Auto-synchronization group to synchronize an echogram with the Media window.
Towed Body Time Offset and towed body Media Position calculations
With suitable associated data (see Required data above), Echoview can determine the offset time required for synchronizing the transducer pings and media recorded from a towed body. Offset times for synchronization are derived from towed body and Platform geometries, right-angle triangle relationships and GPS fixes. See Assumptions and behavior.
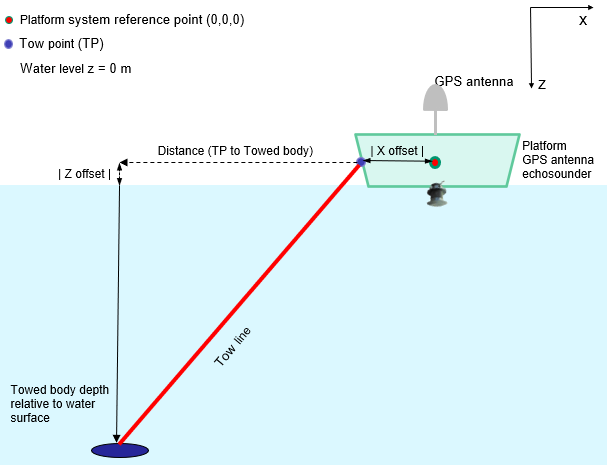
Figure 1: The geometric scheme used in distance and time calculations.
Assumptions and behavior
- The Platform and towed body are traveling at the same speed along a straight cruise track. The towed body lags the platform, and the platform does not turn. This supports the linear interpolation of distance and time between GPS fixes.
- The Towed body time offset operator and the Media synchronization use the GPS data specified for the Platform to calculate times and distances. When GPS data is unavailable/not loaded/not ready, Echoview assigns a no data value to the line segment.
- Time offset calculations rely on right-angle triangle geometry, and requires that tow length is greater than the towed body depth.
- No calculations are performed when the geometry becomes impossible e.g. an invalid tow line length, invalid depth line value (no-data), negative tow point to towed body horizontal distance, or the X-offset is greater than the towed body horizontal distance. Somethimes, only part of the output line is be calculable due to the interaction between operand data and operator settings.
- Where the required time is outside the range of the towed body depth line, or tow line length, Echoview uses the nearest of either the first or last time value of the towed body depth line or tow length line.
- When depth is negative, Echoview uses a depth of 0 meters.
- Towed body distance is set to 0 meters when the tow point alongship offset is greater than the calculated media distance from the tow point (i.e. if it seems that the towed body leads the platform).
Echoview considers the platform and towed body geometries and calculates the (right-angle) distance from the tow point (TP) to the towed body. The time offset is relative to the ping data (i.e. the platform's GPS data which logs the time and position). For each ping, Echoview iterates through GPS fixes with respect to the horizontal distance between the platform and towed body. Echoview then interpolates between fixes for final distance matching and time estimation.
See also
About Media data
About length data
Line CSV data
Towed body time offset virtual line
About transducer geometry
Towed body correction techniques